由用户创建的信息 recoshet
18 August 2015 13:55

Ответ на сообщение пользователя Йеджи ЗаборовскиНе нашёл реквизитов, по которым с Вами можно связаться.
Кирилл, свяжитесь, пожалуйста со мной. Мне нужна Ваша помощь срочно.
В подписе написал свой сайт, где есть мои контакты.
18 August 2015 07:48
При экспорте этой сцены в json или html blender зависает после указания имени файла и кнопки B4W export HTML(JSON). Консоль блендера при этом молчит.
Похоже это случилось после того, как я к одной арматуре привязал ещё один объект (штаны)
Похоже это случилось после того, как я к одной арматуре привязал ещё один объект (штаны)
17 August 2015 21:34
Спасибо за ответ

Ответ на сообщение пользователя Александр КовеленовДа, изначально догадывался, что буду им пользоваться.
Остаётся только рейкастинг
Ответ на сообщение пользователя Александр КовеленовСервак перенёс на 80 порт
И ещё один момент. Нельзя ли повесить websocket-сервер на стандартный порт (80 или 443). У многих людей (в частности, у нас тут в Blend4Web) используется соединение через прокси-сервер. И нам будет намного проще и потенциальная аудитория увеличится

17 August 2015 12:42
Спасибо за ответ. Смысл ошибки понял.
Да, я действительно использовал LocRot.
Это пробная анимашка, так что её полностью перерисую
Да, я действительно использовал LocRot.
Это пробная анимашка, так что её полностью перерисую
17 August 2015 07:58
Начал изучать анимацию. Подскажите, почему половина анимации не соответствует тому, что проигрывает блендер?
de_dust2_razdelno_logik_covb.blend и ANIM.html
P.S. в консоли варнингов не обнаружил
de_dust2_razdelno_logik_covb.blend и ANIM.html
P.S. в консоли варнингов не обнаружил
16 August 2015 15:47
Думаю что coll_dist определяется не правильно.
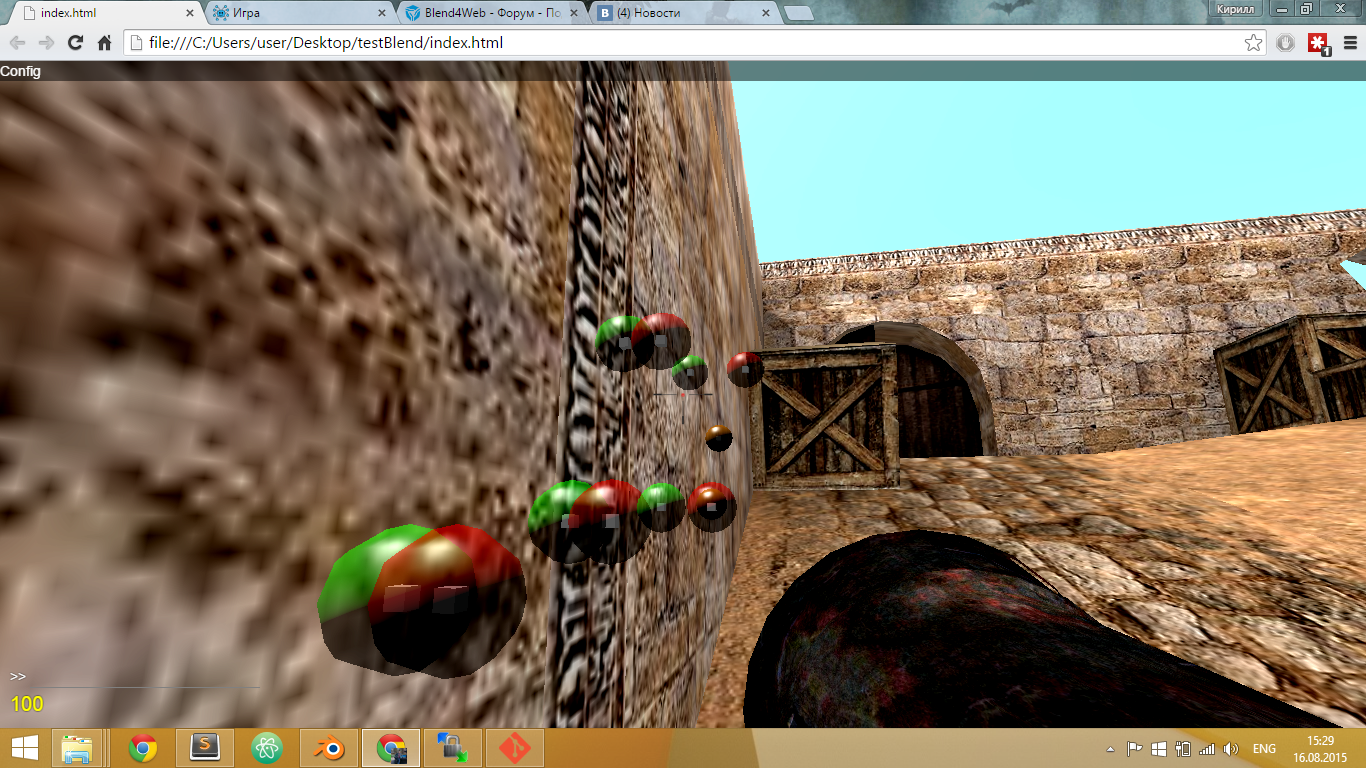
![]()
Стрелял в стену
Зелёная метка - координаты из m_ctl.get_sensor_payload()
Красная метка - результат работы:
Вот почему я минус ставил. Так ближе к стенке было . А сейчас после преобразования наоборот дальше от точки столкновения
. А сейчас после преобразования наоборот дальше от точки столкновения
Демо
Логика определения координат на github
Стрелял в стену
Зелёная метка - координаты из m_ctl.get_sensor_payload()
Красная метка - результат работы:
m_vec3.scaleAndAdd(sensor_payload.coll_pos, sensor_payload.coll_norm, sensor_payload.coll_dist, sensor_payload.coll_pos);
Вот почему я минус ставил. Так ближе к стенке было
 . А сейчас после преобразования наоборот дальше от точки столкновения
. А сейчас после преобразования наоборот дальше от точки столкновенияДемо
Логика определения координат на github
16 August 2015 01:03
Я таки смотрю, вы как будто для меня сделали метод vec3.scaleAndAdd()  Этим и пользуюсь.
Этим и пользуюсь.
Но тут возник вопрос:
У меня есть сенсор столкновения. В событии, которое он вызывает, прописан следующий код:
Но итоговые координаты всё равно не совпали с точкой соударения…
Пробовал нормализовать вектор нормали, что не дало видимого эффекта.
Для чего нужна переменная sensor_payload.coll_dist и как ей пользоваться?
 Этим и пользуюсь.
Этим и пользуюсь.Но тут возник вопрос:
У меня есть сенсор столкновения. В событии, которое он вызывает, прописан следующий код:
var sensor_payload = m_ctl.get_sensor_payload(obj, id, 1);
m_vec3.scaleAndAdd(sensor_payload.coll_pos, sensor_payload.coll_norm, -sensor_payload.coll_dist, sensor_payload.coll_pos);
Но итоговые координаты всё равно не совпали с точкой соударения…
Пробовал нормализовать вектор нормали, что не дало видимого эффекта.
m_vec3.normalize(sensor_payload.coll_norm,sensor_payload.coll_norm);
Для чего нужна переменная sensor_payload.coll_dist и как ей пользоваться?
15 August 2015 08:34
Сенсор коллизии отдаёт два вектора: позицию и направление нормали.
Подскажите как можно перемещать вектор позиции вдоль нормали? Или подскажите, куда смотреть в доках.
P.S. с объектами всё просто, сначала повернул в нужную сторону, потом локально перемещаешь.
Подскажите как можно перемещать вектор позиции вдоль нормали? Или подскажите, куда смотреть в доках.
P.S. с объектами всё просто, сначала повернул в нужную сторону, потом локально перемещаешь.
13 August 2015 21:42
По поводу декалей. Взял код из вашего примера, но координаты от сенсора столкновений приходят с погрешностями (то над стеной, то внутри стены). Можно увидеть, если стрельнуть в стену в этом приложении
Вижу один выход: протянуть raycast и выяснить точку пересечения с колизией, получить нормаль. Может чего ещё посоветуете
UPD: Использую raycast
Вижу один выход: протянуть raycast и выяснить точку пересечения с колизией, получить нормаль. Может чего ещё посоветуете

UPD: Использую raycast
А вот каким образом автор сделал огибание декалью геометрии объекта - это уже интересный вопрос. Полагаю, была использована карта глубины, а может быть и анализируется геометрия.Вот тут можно посмотреть живой пример.
13 August 2015 08:34
Интересный проект. Я как то хотел сделать свою бродилку по гугл картам, используя данные из панорам улиц. А вдохновила меня вот эта демка. Когда машина гуглов ездит по городу, она снимает не только фото, но и простенькую геометрию.